Versatile multistage vehicle and hardware platform
TORCH can carry payloads of several kilograms, including measurement equipment, sensors, robotic arms, area mapping devices, and depth cameras. The platform is designed with a high degree of customization, allowing it to adapt to a wide range of applications. Its modular design enables quick integration or removal of functionality as needed.
| Dimensions | 564 mm x 648 mm |
| Height | 650 mm |
Tele-Operated Robotic Remote-Controlled Hardware (TORCH) is an advanced platform designed for a wide range of exploration tasks. Its ability to carry specialized payloads such as sensors, cameras, and robotic arms makes it ideal for exploring challenging environments, including deep-sea, space, or hazardous terrestrial areas.
| Ingress Protection | IP54 |
| Operating Temperature | -40°C to 80°C |
| Relative Humidity | up to 80% |
Tele-Operated Robotic Remote-Controlled Hardware (TORCH) is a versatile platform designed to enhance automation tasks across various industries. Its modular design allows for seamless integration of tools such as sensors, robotic arms, and cameras, enabling remote-controlled automation in environments that require precision and adaptability.
| Weight Payload | 10 kg |
| Permissible load: | 15 kg |
| Overdrive load | 20 kg |
| Towing load | 20 kg |

The robot hardware control electronic circuit board serves as the central nervous system of robotic systems, facilitating communication and control between various components such as sensors, actuators, and power sources.
| Brushed DC | x 4 |
| Stepper | x 1 |
| Robot Servo | x 14 |
The scalability of Tele-Operated Robotic Remote-Controlled Hardware (TORCH) is a key feature that enhances its applicability across various domains. TORCH's modular architecture allows for easy expansion and adaptation to different tasks by incorporating additional sensors, payloads, and functionalities as needed.
| F-RAM | 2-Mbit |
| Flash | 128 KB |
| EEPROM | 4 KB |
| SRAM | 16 KB |
By leveraging off-the-shelf electronics, including microcontrollers, sensors, and actuators, TORCH minimizes manufacturing costs while maintaining high performance and reliability. Additionally, the design encourages the integration of widely used technologies and open-source software, further enhancing accessibility for developers and researchers. As a result, TORCH provides a budget-friendly solution for various applications, making advanced robotic capabilities attainable for a broader audience.
TORCH employs advanced sensors and detection technologies to provide comprehensive environmental monitoring. By utilizing light photon detection. The built-in cameras enhance the system's capability by capturing real-time visual data, enabling remote assessment of the environment.
| Light | 400 – 700 nm |
| Temperature | Ambient, on-Spot |
| Vibration | 9.0 ± 1.0 kHz |
| Pressure | 0.2 mbar |
| Humidity/CO2 | ± (40 ppm + 5 %) |
| Optical | LIDAR, 44 m |
| IRED | Proximity, 150 cm |
| Camera | 8-megapixel |
| Depth Camera | Perception, tracking |
WLAN (Wireless Local Area Network) allows for high-speed data transfer and real-time communication between the TORCH system and host devices. This interface supports various applications, such as video streaming from onboard cameras and instantaneous sensor data relaying, enabling operators to make quick decisions based on live feedback. Together, these communication interfaces enhance the operational flexibility and effectiveness of TORCH, enabling it to perform efficiently in diverse environments and applications.
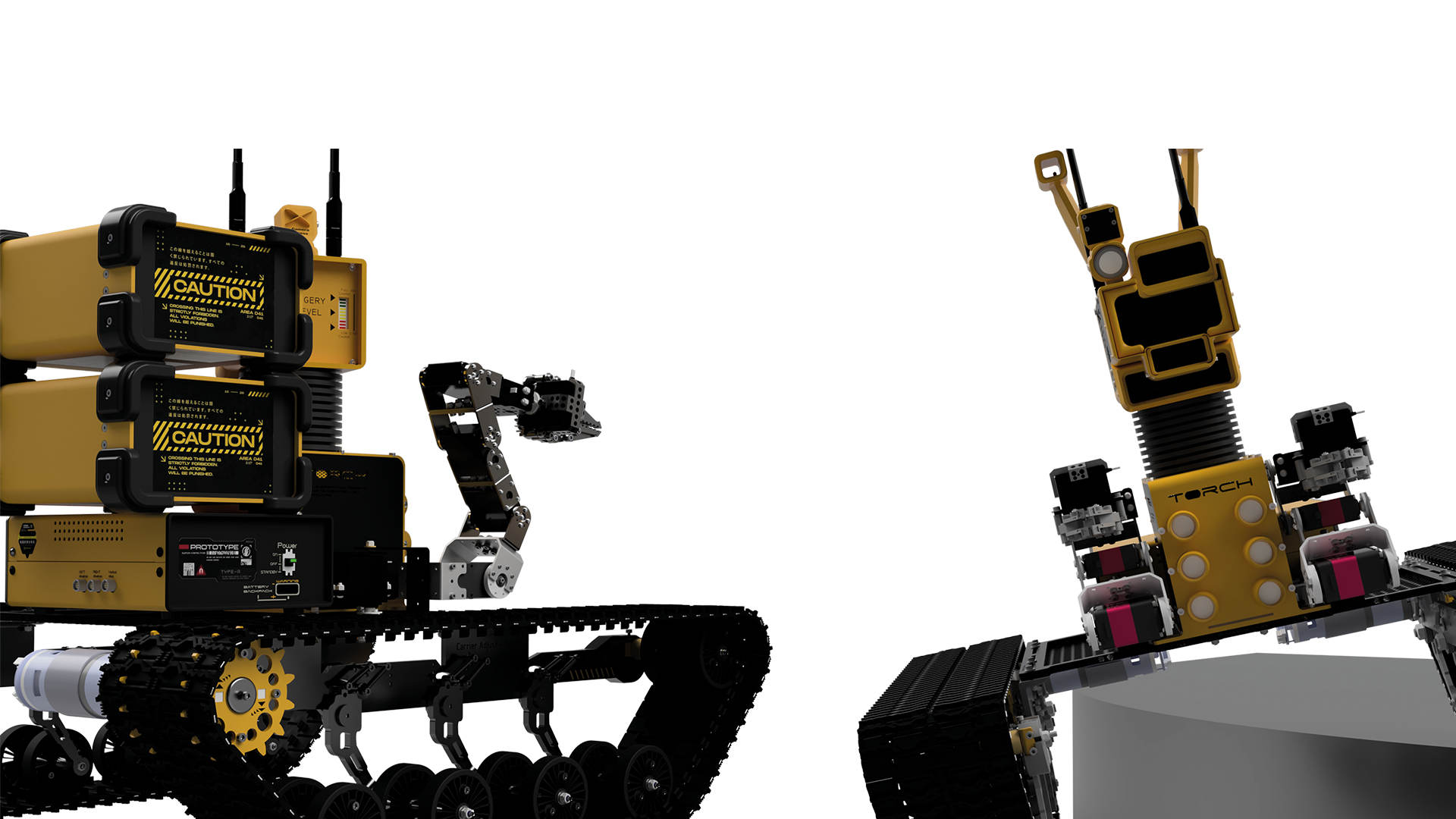
The integration of robotic manipulators, or mechanical arms, significantly enhances its capabilities for remote manipulation tasks. These manipulators can be equipped with various end-effectors, such as grippers, tools, or specialized instruments, allowing the host to perform a wide range of operations from a distance.
| Interface | RoboDrive |
| Memory | Non-Volatile |
| Manipulator | Multisegmented |
Robotic grippers are key end-effectors used for grasping and manipulating objects in robotic systems. Mechanical claws grips, enabling secure handling of different items. Their design ensures reliable object interaction, whether operated autonomously or remotely.
| End-effectors | Claw, Metal |
| Clamp Force | ------- |
| Rotation Angle | +/- 180° |
| Temperature | -40°C - 80°C |
| Ingress | ------- |
Remote manipulation with robotic grippers enables precise control of objects from a distance, allowing operators to handle tasks in hazardous or hard-to-reach environments. Using teleoperation systems, the grippers can perform complex actions like picking, gripping, and moving items. These grippers provide real-time feedback, ensuring accuracy in handling delicate or heavy objects. Remote manipulation is widely used in industries like manufacturing, space exploration, and disaster response, where safety and precision are critical.
| Reach | N/A |
| Rack | Camera, Light, Sensors, Drill |
| Light | LED Matrix |
TORCH is designed to support a significant payload allowance, enabling it to carry various additional equipment such as extra batteries and scientific measurement modules. This capacity is crucial for extended operational periods, as it allows the system to remain functional in the field without frequent recharging.
| Payload | 10 kg |
| Permissible load | 15 kg |
| Towing load | 20 kg |
These low-cost, energy-efficient boards offer powerful computing capabilities in a small form factor, making them ideal for a wide range of applications, from IoT devices and robotics to home automation and educational projects. Popular Linux SBCs like Raspberry Pi, BeagleBone, and Odroid are equipped with GPIO (General Purpose Input/Output) pins for interfacing with external hardware, making them versatile for embedded systems development. With robust software support and a vast Linux ecosystem, SBCs enable developers to create custom, scalable solutions for various technical tasks.
| Option 1 | Raspberry Pi |
| Option 2 | Nvidia Jetson Nano |
Custom research modules are specialized hardware components or software integrations designed to extend the functionality of platforms like Tele-Operated Robotic Remote-Controlled Hardware (TORCH) or Linux-based SBCs. These modules are engineered for specific research tasks such as environmental data acquisition, experimental control, or advanced sensor integration.
The integration of a vibration scanner with the Tele-Operated Robotic Remote-Controlled Hardware (TORCH) enhances its capability to detect and analyze sources of vibrations in various environments. This specialized sensor is designed to accurately measure vibrational frequencies and amplitudes, identifying potential issues in machinery, structures, or natural formations.
| Sensitivity | 9.0 ±1.0 kHz |
| Resonance Frequency | 4,6KHz |
| Resonant Impedance (R1) | 300Ω |
| Capacitance | 20nF |
The retractable vibration scanning device, integrated with a mechanical arm, is designed to facilitate precise and direct measurements of vibration on targeted surfaces or structures. This innovative system combines advanced vibration sensing technology with a flexible mecha-arm, nabling operators to deploy the sensor accurately in hard-to-reach or complex environments.
The retractable feature of the mecha-arm allows for seamless extension and retraction, providing the capability to navigate tight spaces while ensuring the sensor can be positioned exactly where measurements are required.
The visualization of measurement data for vibration occurrences, magnitudes, noise levels, and thresholds is a critical component of effective analysis in various engineering and scientific applications. By integrating robust data visualization techniques, operators can gain deeper insights into vibrational behaviors and their impact on structures or systems.
Through VR goggles, users can experience real-time feedback from TORCH’s onboard sensors and cameras, allowing them to navigate and manipulate their surroundings with precision. This immersive experience enhances spatial awareness, enabling operators to perform complex tasks, such as remote inspections, assembly, or data collection, in challenging or hazardous environments.
The Tele-Operated Robotic Remote-Controlled Hardware (TORCH) supports remote control and teleoperation through conventional desktop computers equipped with a keyboard and mouse. This interface allows users to operate TORCH efficiently from a safe distance, making it suitable for various applications, including industrial inspections, surveillance, and research.
Using a desktop computer, operators can access a user-friendly graphical interface that displays real-time data from TORCH’s sensors and cameras. The keyboard and mouse facilitate intuitive navigation and control, enabling precise movements and actions.
Furthermore, the system allows for the operation of the Remote Automated Guided Vehicle (AGV) using a standard keyboard and mouse from any computer. This user-friendly interface eliminates the need for additional hardware, such as VR goggles or joysticks, making it accessible and convenient for a wide range of users.
The intuitive control scheme enables operators to easily navigate and manage the AGV, facilitating tasks such as route planning, obstacle avoidance, and real-time monitoring of operational status.
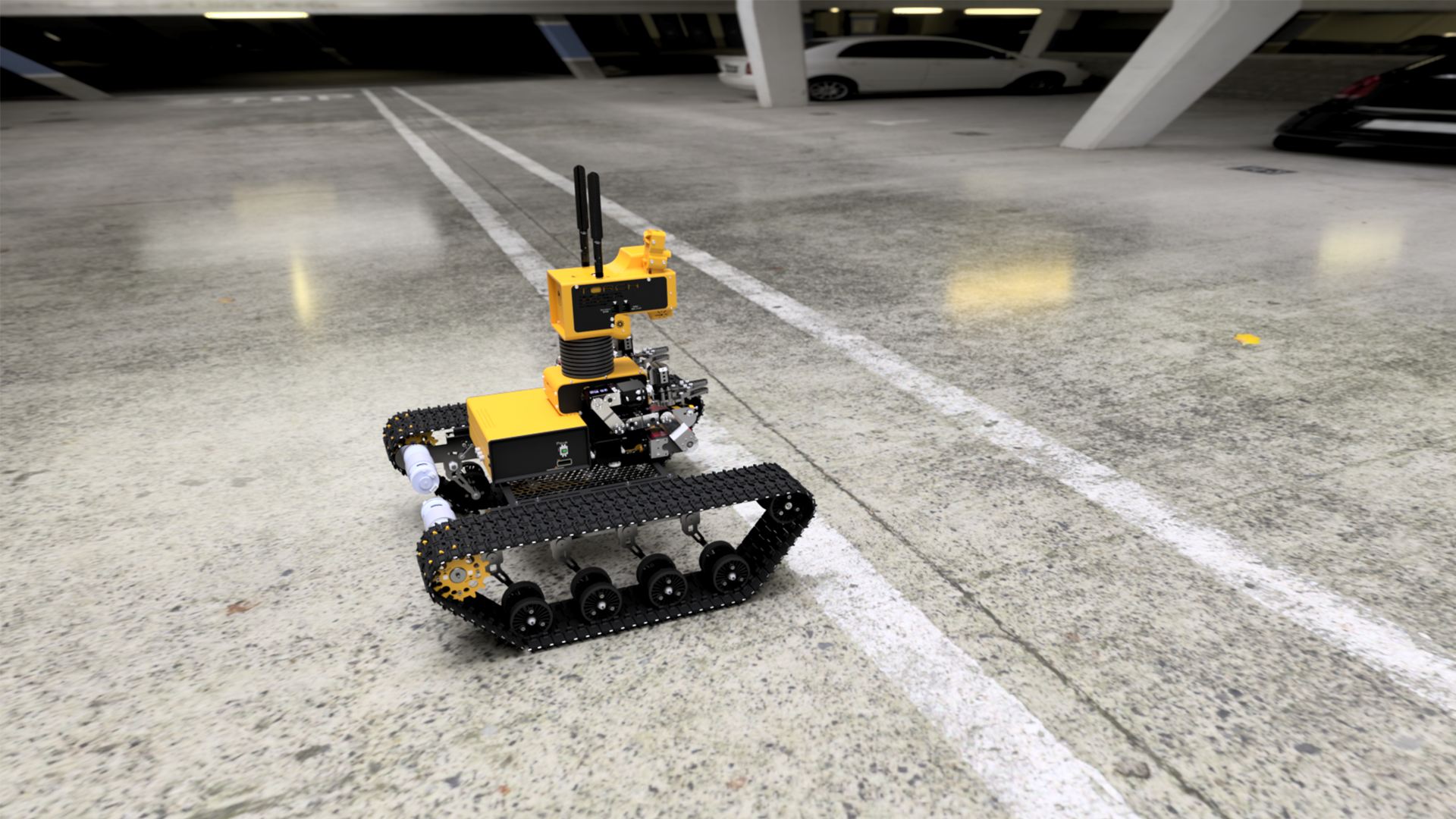
Adaptive suspension and an aggressive track profile for enhanced gripping on challenging terrains, ensuring stability and traction across rough and uneven surfaces.
The electromechanical actuator arm features an integrated technical claw for precise manipulation, ideal for handling objects, basic assembly and material handling applications.
Optical and infrared (IRED) distance measurement s combined with a camera for high-precision tracking and mapping capabilities.
The electromechanical actuator arm features an integrated technical claw for precise manipulation, ideal for handling objects, basic assembly and material handling applications.
The RoboDrive engine controls TORCH hardware and facilitates duplex real-time communication with the host, ensuring precise operation and continuous data exchange for seamless remote management.
CNC-machined from high-strength metal alloy, combined with a honeycomb structure to deliver an optimal strength-to-weight ratio. This design ensures maximum durability while keeping the overall weight low.
Equipped with advanced sensors to monitor environmental conditions and provide real-time data.
Features energy-efficient systems that ensure long-duration operation with minimal power consumption.
Integrated high-resolution cameras for detailed imaging and video recording.
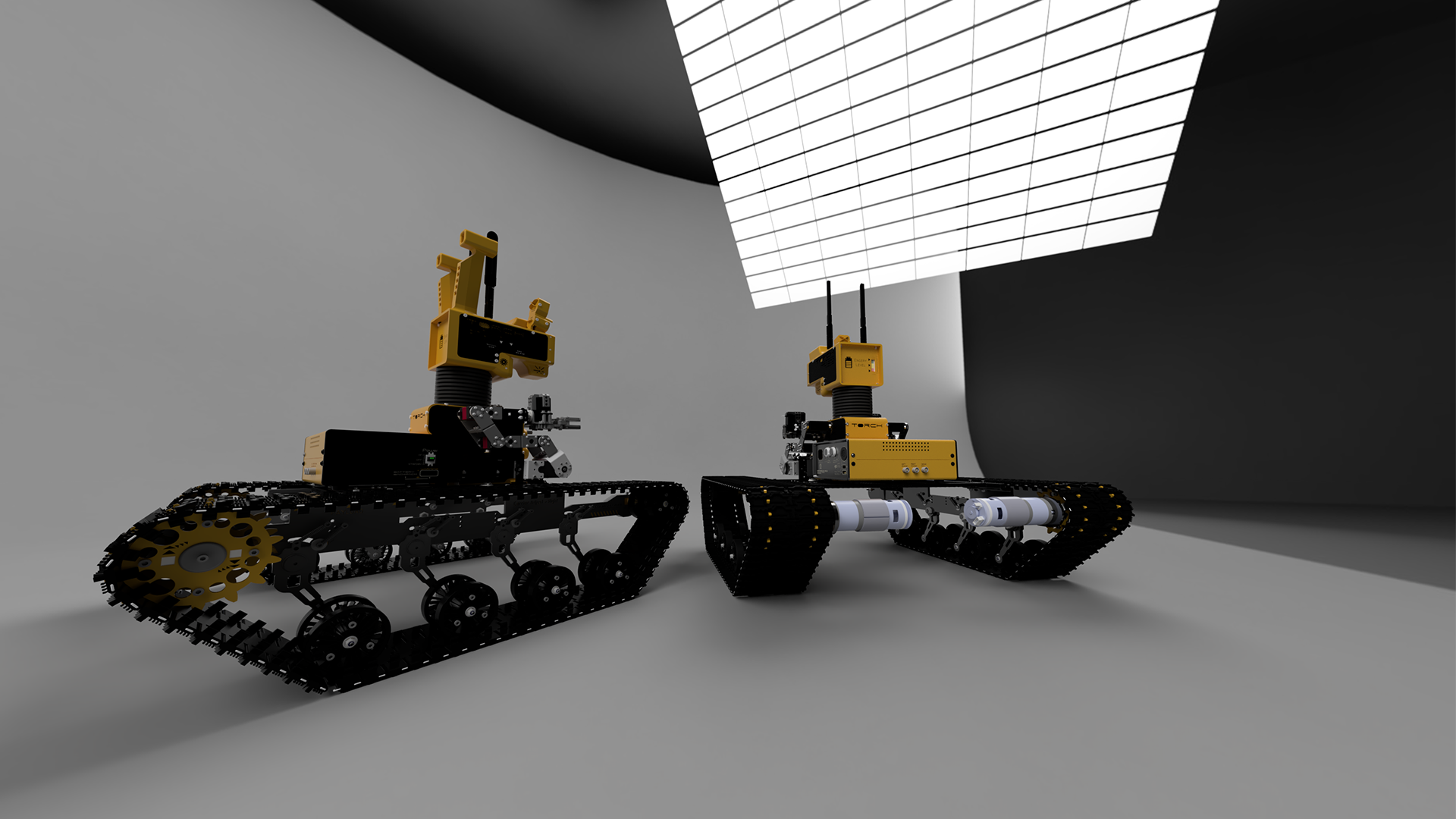
Illustration of the TORCH CAD Model and Digital Clone of the AGV Vehicle.The TORCH CAD model provides a detailed digital representation of the real Automated Guided Vehicle (AGV), showcasing its structural components and design features.Overall, the TORCH CAD model serves as an essential tool for design validation and communication among engineers and stakeholders.
| Length | N/A |
| Rack | Camera, Light, Sensors, Drill |
| Drag | N/A |
| Light | LED Matrix |
The TORCH CAD model provides a detailed digital representation of the real Automated Guided Vehicle (AGV), showcasing its structural components and design features.The CAD model is customizable for specific applications, facilitating rapid prototyping and iterative development. Overall, the TORCH CAD model serves as an essential tool for design validation and communication among engineers and stakeholders.
The tracked drivetrain, coupled with an adaptive suspension system, delivers smooth motion across various rough terrains by effectively absorbing vibrations and impacts. This innovative design enhances stability and comfort during operation, allowing the vehicle to navigate challenging landscapes with ease.
The adaptive suspension system automatically adjusts to changes in terrain, providing optimal clearance for overcoming obstacles while maintaining traction. This capability not only improves the vehicle's maneuverability in rugged environments but also minimizes the risk of damage to both the vehicle and its payload.
By ensuring a higher ground clearance and superior shock absorption, the tracked drivetrain facilitates seamless navigation over obstacles such as rocks, roots, and uneven surfaces, making it ideal for applications in fields like agriculture, construction, and exploration.
The initial stages of development involve creating concept art, illustrations, and drawings to visualize the project. This phase focuses on clarifying potential functionality and features, laying the groundwork for subsequent design and engineering efforts.
During the CAD design stage, we synthesized bodywork and developed strategies to integrate the electronic circuit boards effectively. Drawing inspiration from nature, we aimed to optimize the vehicle's design, enhancing functionality and efficiency while ensuring seamless incorporation of technology.
By leveraging insights gained from our previous generation inspection AGV, the Kenji-X1, we accelerated the design stage for TORCH. We incorporated lessons learned from the Kenji-X1 and enhanced those features, ensuring a more efficient and effective development process.
Utilizing the latest advancements in AI and generative design processes, along with cutting-edge CAD software and simulations, the TORCH prototype was assembled at the F.A.R.M. Potsdam Laboratory earlier this year. This achievement was made possible by our highly skilled team of mechatronic engineers and technicians, who applied their expertise to bring the project to fruition.
Currently, we are diligently working in our fabrication lab and laboratory to finalize preparations for field testing. Weather conditions and facility availability will dictate the timeline, with plans to commence testing in early 2025.
According to our current roadmap and planning, several initial units of the TORCH will be manufactured and made available to beta testers worldwide. This phase aims to gather valuable feedback to refine the product and enhance its performance before full-scale production.
Full production assembly and manufacturing of the TORCH in Potsdam is scheduled for the second quarter of 2025. This phase will mark the transition from prototype development to large-scale production, ensuring that the vehicle meets the demands of the market.
The left and right mecha-arms function fully independently and can be operated while the vehicle is in motion. This capability allows for simultaneous driving and manipulation tasks, enhancing operational efficiency and multitasking in dynamic environments.

The tracked undercarriage provides high ground clearance and reliable performance on soft soil, snow, and grass, with added towing capability.

The drivetrain is powered by electric motors utilizing permanent magnets and graphite commutation, providing efficient, reliable performance and smooth power delivery.

Both mecha-arms are equipped with embedded logic that allows users to store custom-programmed movement patterns, whether simple or complex. Inverse kinematic algorithms handle all motion calculations, ensuring smooth and precise operation without the need for manual adjustments.

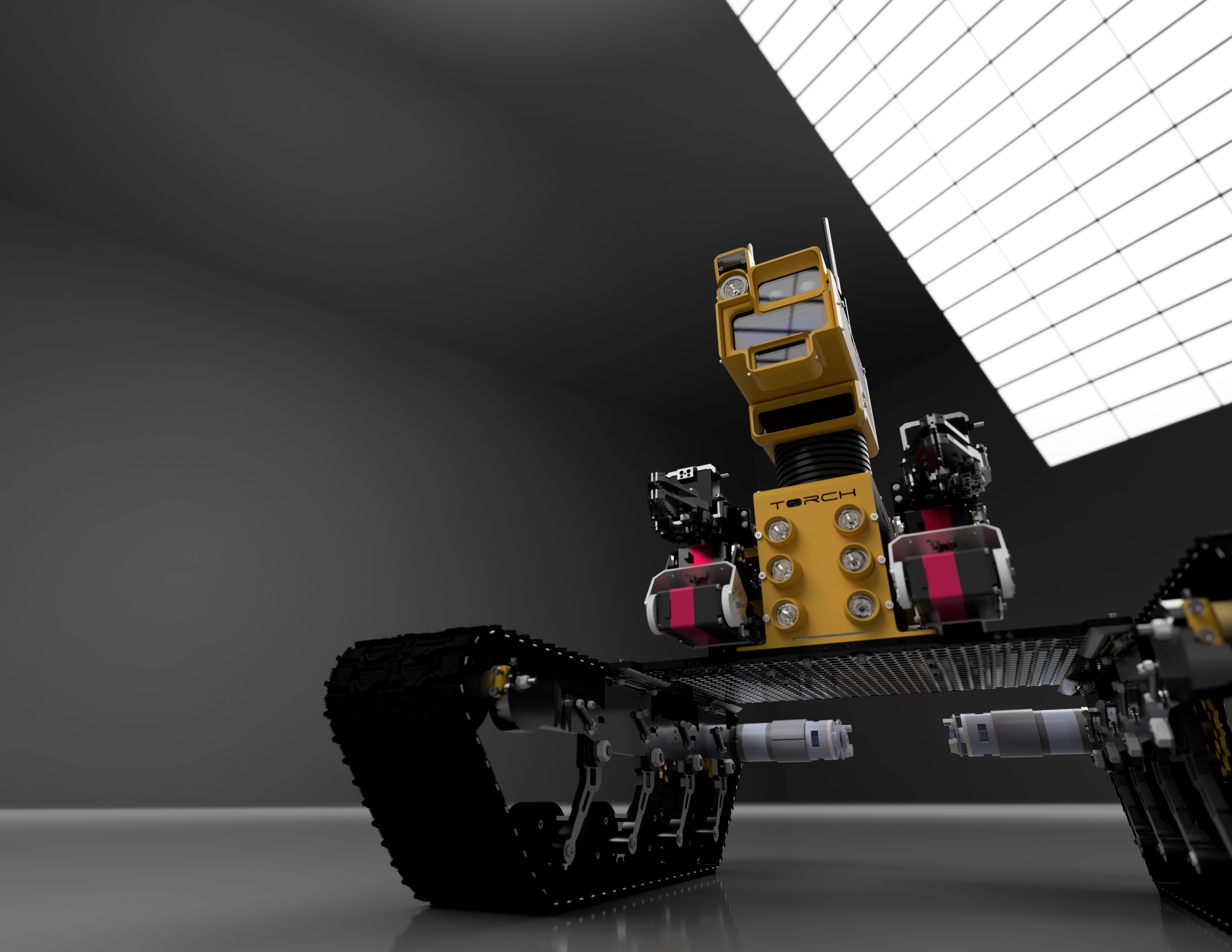
The 360° continuous rotation Mastcam captures real-time, wide-angle views of the surroundings. Combined with LIDAR and IRED sensor data, it provides comprehensive situational awareness for driving and local navigation, enabling precise maneuvering in complex environments.

The 2-stage shock absorption system on the runner wheels ensures even weight distribution and smooth track operation, enhancing stability and performance on uneven terrains.



To develop and manufacture a universal inspection AGV platform for land, air, and underwater operations. We aim to make tracked robotic inspection systems accessible to a wide range of users and communities. Our goal is to supply fast-deployable, service-free remote inspection solutions to law enforcement, firefighters, research groups, and consumers. Additionally, we seek to introduce tele-robotics technology to universities, institutions, and educational centers, fostering innovation and collaboration in robotics.