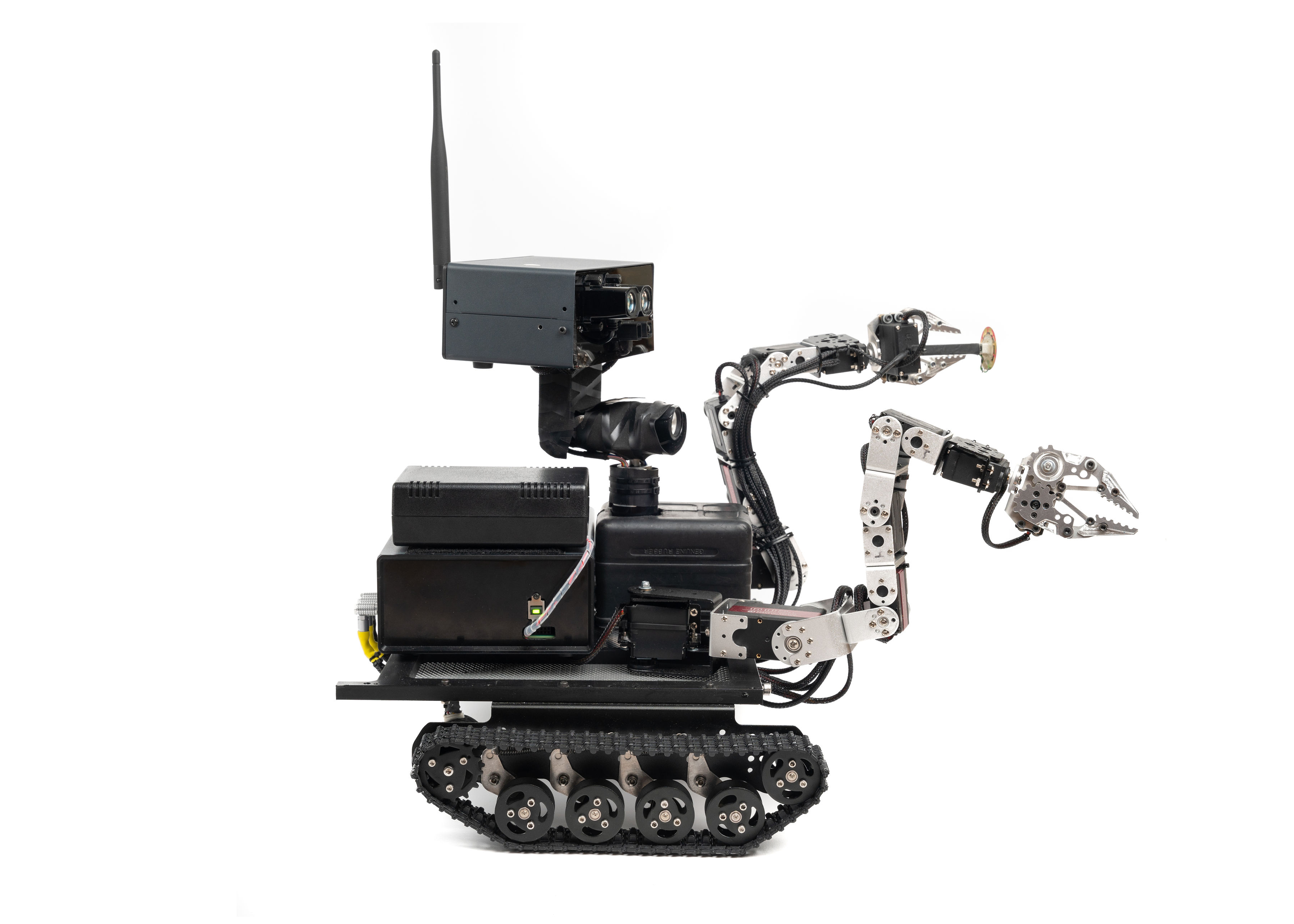
Indoor-Outdoor configurable and hackable Inspection AGV
Kenji-X1 features an open, chassis-free design, enabling rapid servicing in challenging environments, university labs, or even at home. Built with familiar, widely available tools in mind, it’s user-friendly for maintenance, modifications, and customization, making it ideal for quick adjustments by users and enthusiasts alike.
| Dimensions | 380 mm x 465 mm |
| Height | 530 mm |
| Payload | KG |
| Battery Capacity | 120 Wh |
| Temperature | -60°C to 80°C |
As hardware developers and robotics engineers, we understand the frequent need for servicing and internal adjustments. That's why we developed a design strategy that minimizes time spent on screwing and unscrewing, streamlining access to components. After all, when working in tough conditions, every second counts—and tiny screws can vanish in an instant!
| Ingress Protection | IP54 |
| Operating Temperature | -40°C to 80°C |
| Relative Humidity | up to 80% |
Kenji-X1 transforms into a mobile workstation using simple WLAN or GSM networks, equipped with an onboard Linux computer for full desktop functionality in the field or lab. With scripting and preprogrammed precision movements, Kenji-X1 can perform chemical reactions in lab chambers or synthesize hazardous organic compounds, reducing direct human exposure and enhancing safety in complex tasks.
Kenji-X1 is built to handle precise lab tasks, from changing samples and recording chemical reactions to safely mixing explosive compounds and monitoring outcomes. With a bit of creativity, it becomes a versatile tool for complex and sensitive experiments, enhancing both safety and efficiency.
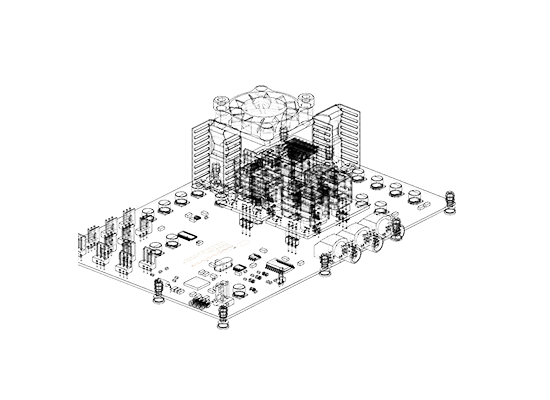
Robodrive Engine is a ready-to-go solution for direct, real-time control of robotic functions, designed with strict timing and optimized resource management in mind. Combining robust hardware with feature-rich firmware, it offers extensive configuration options, serviceability.
| Brushed DC | x 4 |
| Stepper | x 1 |
| Robot Servo | x 14 |
The scalability of Tele-Operated Robotic Remote-Controlled Hardware (TORCH) is a key feature that enhances its applicability across various domains. TORCH's modular architecture allows for easy expansion and adaptation to different tasks by incorporating additional sensors, payloads, and functionalities as needed.
| F-RAM | 2-Mbit |
| Flash | 128 KB |
| EEPROM | 4 KB |
| SRAM | 16 KB |
By leveraging off-the-shelf electronics, including microcontrollers, sensors, and actuators, TORCH minimizes manufacturing costs while maintaining high performance and reliability. Additionally, the design encourages the integration of widely used technologies and open-source software, further enhancing accessibility for developers and researchers. As a result, TORCH provides a budget-friendly solution for various applications, making advanced robotic capabilities attainable for a broader audience.
Kenji-X1 enables SLAM, long-range distance measurements, and precise obstacle tracking through high-precision Optical LIDAR, IRED proximity sensors, and an optional camera. Data is directly relayed to the user’s PC over a fast WLAN network, providing real-time insights for seamless navigation and monitoring.
| Optical | LIDAR 44 m |
| IRED | Analog Proximity 150cm |
| Camera | 8-megapixel |
Regulatory approvals: CLASS 1 LASER PRODUCT CLASSIFIED EN/IEC 60825-1 2014. This product is in conformity with performance standards for laser products under 21 CFR 1040, except with respect to those characteristics authorized by Variance Number FDA-2016-V-2943 effective September 27, 2016. System contains no user serviceable components. Repair or service of the system is only to be handled by factory trained technicians. No service by the user is allowed.
| Range | 5 cm to 40 meters |
| Update rate | Greater than 1 kHz |
Kenji-X1 displays measurement data directly on the Mast-Cam’s heads-up display or sends it as ASCII to the host PC for further analysis and graphical visualization. This rapid process takes just seconds, ensuring real-time data access and efficient decision-making. Built for flexibility, it can switch seamlessly between display modes depending on task requirements. With robust processing capabilities, Kenji-X1 is equipped to handle high data loads and continuous feedback in dynamic environments.
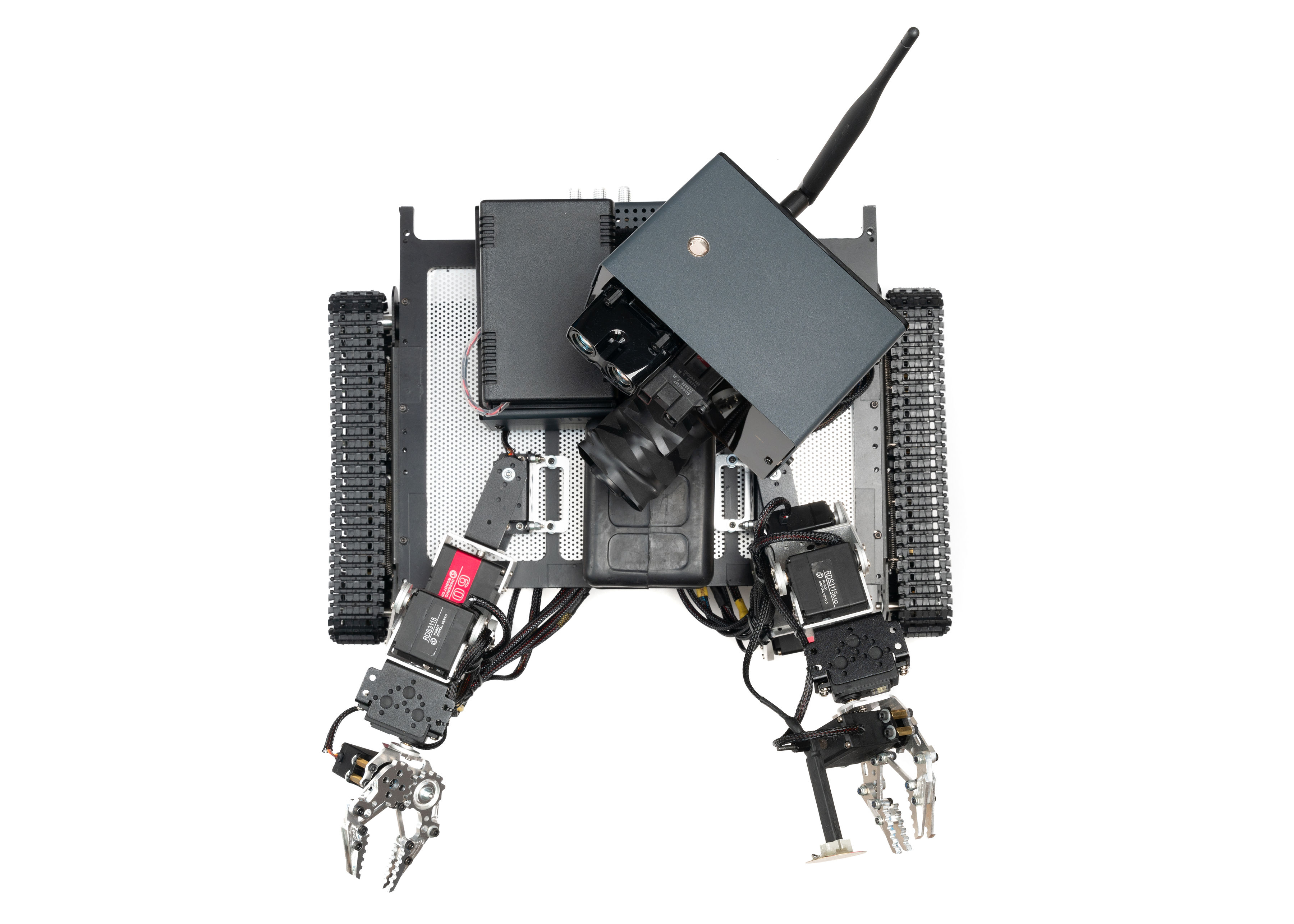
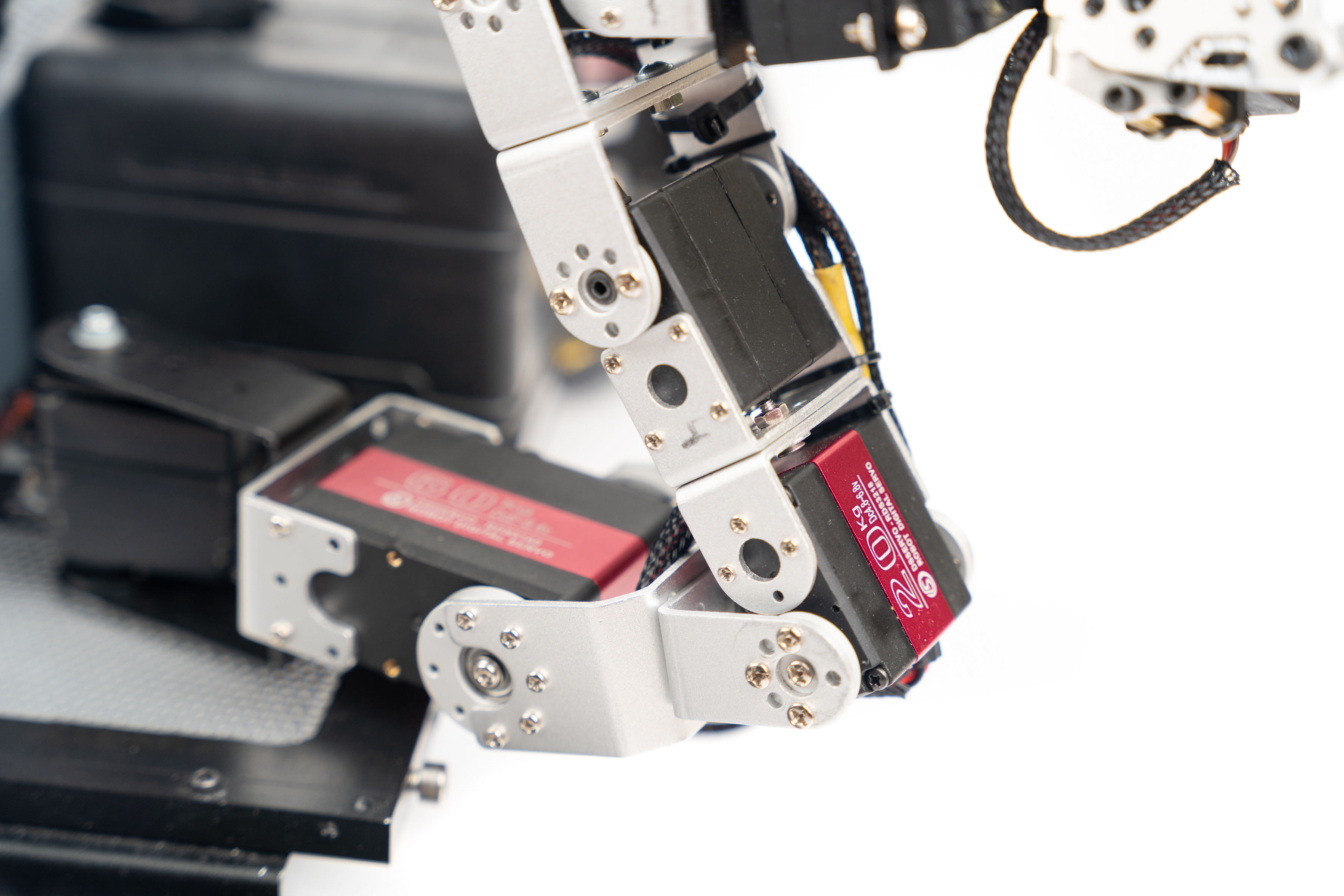
The Kenji-X1 Inspection AGV is equipped to support the Mecha-Arm v.1, allowing for the simultaneous installation and control of two arms via the RoboDrive Engine Console. Utilizing a host PC and WLAN/GSM networks, operators can employ mobile manipulation to deploy Kenji-X1 effectively. Both the left and right Mecha-Arms can function independently, even while the vehicle is in motion.
| Interface | RoboDrive |
| Memory | Non-Volatile |
| Manipulator | Multisegmented |
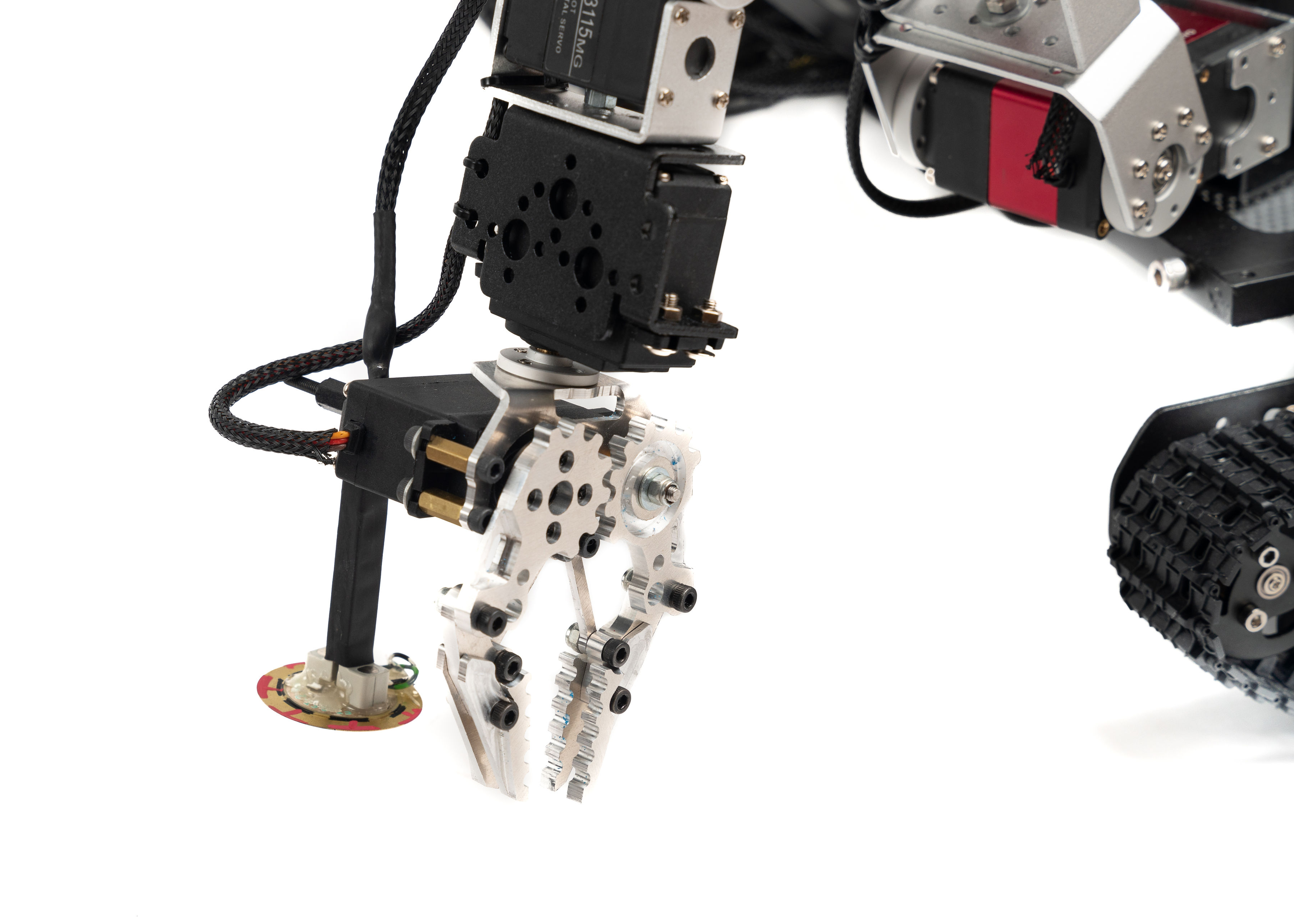
The Mecha-Arm v.1 features six degrees of freedom, including a versatile technical claw as its end-effector. Each arm is capable of load-bearing capacities of several kilograms, making it suitable for a variety of tasks. Designed for durability, both arms are partially immersible in liquids, ensuring resistance to liquid damage during operations. Furthermore, the high-reliability onboard non-volatile memory allows for programming new movements, manipulations, and repetitive movement patterns, enhancing operational efficiency and adaptability in diverse environments.
| End-effectors | Claw, Metal |
| Clamp Force | ------- |
| Rotation Angle | +/- 180° |
| Temperature | -40°C - 80°C |
| Ingress | ------- |
The Mecha-Arm is designed for efficient object handling with a load capacity of several kilograms. It features a technical claw as its end-effector, allowing it to securely grasp and transport various objects. With six degrees of freedom, the arm provides flexibility in movement, enabling it to reach and manipulate items in tight spaces. The arm's onboard non-volatile memory can store programmable movement patterns for repetitive tasks, increasing efficiency. Its partially immersible design offers resistance to liquid exposure, making it suitable for diverse operational environments.
The Kenji-X1 AGV is powered by a default 94.5Wh Battery Backpack, serving as its primary energy source. An optional secondary backpack connection can be utilized as a payload container, effectively doubling the vehicle's uptime. This configuration allows the AGV to operate for extended periods without interruption, making it ideal for long-duration tasks and remote operations.
| Cell type | 18650 |
| Manufacturer | Panasonic |
| Capacity | 3450mAH |
| Discharge Rating | 10 A |
The Kenji-X1 AGV supports artificial intelligence and machine learning tasks through an interface compatible with various Linux machines, including Nvidia Jetson, Raspberry Pi, and Beaglebone, among others. These single-board computers (SBCs) can be powered using available onboard power rails. The AGV also facilitates inter-integrated bidirectional connectivity via standard USB ports, as well as RS-232, UART, and hardware interfaces like SPI and I2C. This extensive connectivity enables seamless integration of advanced processing units, allowing for enhanced data analysis and decision-making capabilities in real-time operational environments.
| Option 1 | Raspberry Pi |
| Option 2 | Nvidia Jetson Nano |
For custom research, development, and small hardware systems designed by scientists or makers, the Kenji-X1 AGV offers an empty carriage payload container. This container serves as an enclosure for securely housing additional hardware components, enabling seamless transportation and integration onboard the vehicle. Its versatile design allows users to customize the payload for specific applications, making it ideal for experimental setups, prototypes, or specialized equipment.
The Kenji-X1 Inspection AGV features support for an onboard Vibration Scanner System, allowing for detailed vibration analysis. The sensor probe can be directly mounted on the Mecha-Arm v.1, facilitating precise measurements in various environments.
| Sensitivity | 9.0 ±1.0 kHz |
| Resonance Frequency | 4,6KHz |
| Resonant Impedance (R1) | 300Ω |
| Capacitance | 20nF |
Configuration and setup of the scanner occur within the RoboDrive Engine Console, ensuring user-friendly operation. Measurement data acquired from the sensor can be stored locally in the onboard non-volatile memory module or transmitted to the host PC via network connections. This capability enables efficient data collection and analysis, enhancing the AGV’s functionality for inspection and research tasks.
The Kenji-X1 Inspection AGV performs direct measurements onboard, capturing data that is then transmitted to the onboard Linux SBC. Depending on the operator's preference, this data can also be relayed to the host PC where the operator is located. Graphical representation and visualization of the measurement data can be executed on either the host PC or the onboard SBC, providing flexibility in data analysis and interpretation. This streamlined process enhances the AGV's efficiency in delivering real-time insights during inspection and research operations.
Mecha-Arm v.1, Robotic Manipulation, six degrees of freedom, including a versatile technical claw as its end-effector.
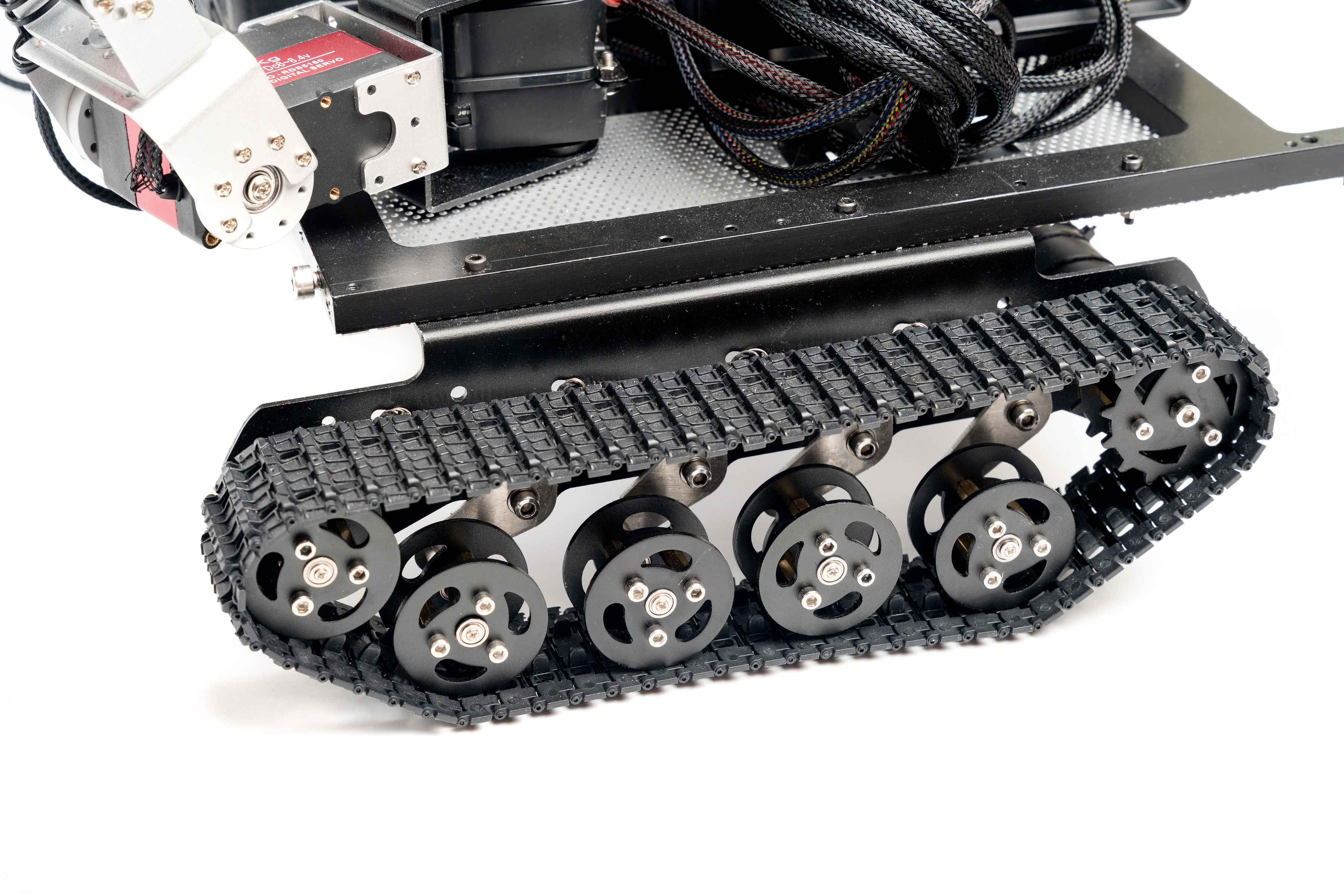
The drivetrain is powered by electric motors utilizing permanent magnets and graphite commutation.
2.4GHz ½ Wave Dipole Antenna, Omni-directional Gain Antenna. A rugged high Gain Antenna for 2.4GHz / WLAN applications, where high performance is required
Engineered with aerospace-grade aluminum alloys, with an exceptional strength-to-weight ratio for robust performance without added bulk. The design incorporates distortion-free optical glass and, corrosion-resistant materials. This material selection enhances the AGV’s resilience, precision, and longevity.
The Kenji-X1 AGV is equipped with an LED Night-Light with multiple operation modes to support effective nighttime use. These modes allow for customized lighting based on operational needs, enhancing visibility in low-light. This ensures reliable performance for tasks conducted during night hours or in dark environments.
Optical LIDAR with 40 meter laser-based sensor offers greater than 1 kHz measurement speed up to 10 meter distances — and improved accuracy at all distances.
Support for an onboard Vibration Scanner System, allowing for detailed vibration analysis. The sensor probe can be directly mounted on the Mecha-Arm v.1.
Battery Backpack, Extended Power Solutions, default 94.5Wh Battery Backpack, as primary energy source.
The Kenji-X1 AGV appearss in a sleek dark color scheme, combining black ABS plastic, rubber, and nylon with powder-coated metal and distortion-free Plexiglas. This durable and cohesive material selection not only enhances aesthetics but also provides resilience against wear, impact, and environmental stress. This consistent design approach strengthens the AGV’s reliability and aligns with the practical, rugged requirements of field operations.
| Length | N/A |
| Rack | Camera, Light, Sensors, Drill |
| Drag | N/A |
| Light | LED Matrix |
Design emphasizes easy access to the Robodrive control board and electronics bay, for prototyping and testing. Users need only two Philips screws to access the electronics bay and a single M3 screw to remove the Robodrive control module entirely. Other hardware subsystems are similarly modular, allowing quick attachment or detachment. This accessibility reduces setup time and enhances efficiency for testing, modifications, and repairs, supporting iteration for development teams.
The Robodrive Engine Control Board is a control hub designed to manage the AGV’s functions. Internally, it hosts modular circuitry for real-time command execution, duplex communication, and power regulation, all optimized for minimal latency. The board features easily accessible I/O ports, enabling rapid prototyping, customization, and system upgrades. Its architecture is streamlined for efficient thermal management and durability, making it suitable for both standard and intensive operational environments.
Mecha-Arm v.1 features four degrees of freedom, including a versatile technical claw

The tracked undercarriage provides high ground clearance and reliable performance on soft soil, snow, and grass, with added towing capability.

The tracked drivetrain, coupled with an adaptive suspension system, delivers smooth motion across various rough terrains by effectively absorbing vibrations and impacts.

Both mecha-arms are equipped with embedded logic that allows users to store custom-programmed movement patterns, whether simple or complex. Inverse kinematic algorithms handle all motion calculations, ensuring smooth and precise operation without the need for manual adjustments.

The 360° continuous rotation Mast-Cam captures real-time, wide-angle views of the surroundings. Combined with LIDAR and IRED sensor data, it provides comprehensive situational awareness for driving and local navigation, enabling precise maneuvering in complex environments.

Robotic grippers are key end-effectors used for grasping and manipulating objects in robotic systems.



At F.A.R.M., our mission is to transform education by replacing outdated routines with hands-on, self-paced learning experiences. We recognize that every learner is unique, which is why our upcoming Tutorial Book is designed to support individualized learning paths, empowering students to learn in ways that suit them best. Through engaging, practical approaches, we aim to foster deeper understanding and inspire the next generation of innovators. Our approach extends to all aspects of STEM learning—from robotics and programming to electronics and engineering principles. By blending comprehensive tutorials with project-based learning modules, we aim to bridge the gap between theoretical knowledge and practical skills, making advanced concepts accessible to learners from all backgrounds. At F.A.R.M., we’re committed to inspiring the next generation of thinkers and creators, equipping them with the tools to excel in a rapidly evolving world.