Article introduces the KenjiX1 open-source tele-robotics development platform from Physalis Labs. Goes in detail about its advantages and disadvantages, and what one can expect from it in reality. Detailed introduction to the robot’s hardware and onboard measurement subsystems, actuators has been discussed in detail. Furthermore a brief study of the control theory, software and hardware interfaces has been evaluated in real-word and in laboratory environments.
Tracked-robots that employ tracks instead of the wheels, similar to but not limited (caterpillars, military and infantry tanks, snowmobiles, slope-grooming machines, construction vehicles, polar vehicles) have proven to be useful in numerous applications over many years. These type of locomotion works well in uneven and rough terrain, as tracks can offer greater and better traction, eliminating and reducing slippage. This vehicle propulsion type is accomplished by a continuous band of treads which is driven into the motion via several wheels. The so-called tracks and sprockets offer an alternative to wheels and to quadruped’s limbic structure. The rubber or polypropylene tracks when installed on robots enable a larger contact with a surface/ground at any given time. The larger surface area helps exerting a lower force per unit area on the ground being traversed, than a conventional wheeled vehicle having same weight. The tracked vehicles or tracked robots Fig. 1 are suitable for use in soft, low-friction, and uneven ground, such as mud, ice or snow, natural green covered land, soil and sandy terrains.

Fig. 1. KenjiX1, courtesy of Physalis Labs https://physalislabs.org/projects/kenjix1/.
Tracked robots have a weight distribution on a much larger area, in comparison to wheeled robots or quadrupeds. Therefore they perform well in places prone to sinking: deep snow, sand, mud and soil. Which is not the case for wheels and joints, as the force per unit is orders of magnitude higher, and can accelerate sinking. The tracked robots have higher load tolerances, compared to wheels or quadrupeds.
Tracks can operate not only on rough terrain, but also on stairs, on vertical drops and on the snow. The tracked robot can operate on rough terrain, where the wheeled ones can get stuck, the continuous band of treads can ascend and descend stairs, surmount obstacles, or cross ditches, push or pulls heavy loads in horizontal and on vertical ascents and descends.
Wheeled robots can’t traverse in rough, uneven and loose terrain, they can roll over obstacles which are smaller than its wheel diameter, but can’t roll over larger obstacles. Tracks can cross over larger obstacles due to their greater area of ground contact, Wheels robots are designed to work on specific environment, but tracks can be used on any terrain (indoor and outdoor).
KenjiX1 has been designed towards tracked locomotion. Therefore it can perform well in both situations outdoors where rough terrain and unpaved roads are expected, but also indoors. It does not have the classical unibody design, where all the hardware is located inside one compartment. This design renders itself expandable for future. In fact it also adds a layer of flexibility to the system. Being able to undergo reconfiguration according to applications demand is a powerful feature that developers and users will benefit from.

Fig. 2. KenjiX1 systems overview, a:(roboDrive Engine Module), b:(Tower/Mastcam Module), c:(Rechargeable Battery Module), d:(Compute Module), e:(Detachable Mecha-Arms).
Robot-control has been distributed in two modules, Fig. 2 and by attaching or detaching them you basically add or remove functionality. This boosts the robot’s upgradability, and flexibility for future updates both on hardware side and adaptability towards application. Physalis Labs has developed a hardware engine, called roboDrive which is a hardware efficient, low-level and simple method to interact with the KenjiX1 robot. The roboDrive Engine’s built-in PCB, which then when powered-up is interacting with the roboDrive operating system and initiating all data input and output operations in real-time.
Robot control is divided into two tiers. Tier-1, the very low-level close to hardware control subsystem with a dedicated controller, and the Tier-2, high level control and communication controller, which also serves as a computation module for heavy-duty data evaluation and streaming tasks. The roboDrive module comes by default and the system is not functional without it. Inside the roboDrive module, you have options for further customization, which are directly on hardware level. Not only robot itself is designed modular, but the same modules inside, are also customizable on the PCB level Fig. 3.
The module capable of controlling low-power and high-power electric motors, and servo-motors, and can handle current draws up to 10 Amps. It’s a very robust and stress tolerant module and can handle and recover from power hungry situations in field.
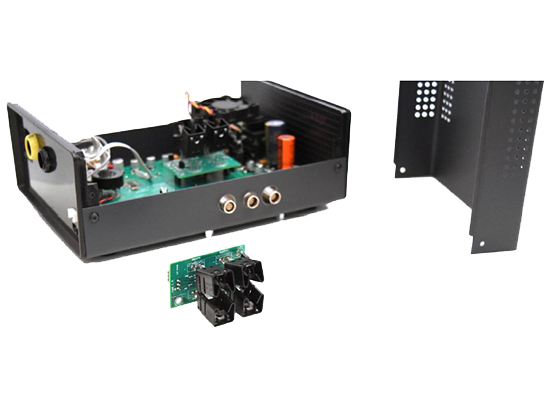
Fig. 3. PCB-stack inside the roboDrive module.
Tower module aka Mastcam is located at the top of the robot and serves as a sensor hub. It lifts the entire system up against the ground to enable better viewport and viewing angles. Tower module does both movements, rotation 360° continuously and vertically up or down, in range 30°-120° degrees Fig. 4. In combination with high-performance LIDAR, jumpstart into SLAM and areal mapping becomes possible right away.

Fig. 4. KenjiX1 Tower Module TM-2, Mastcam.
Physalis Labs offers two different types of “Tower Modules” for KenjiX1. The high-performance TM-2 is the feature rich version, and the standard TM-1, which is default configuration. It is planned to introduce new module upon user demands over the time.
TM-1 comes with different analog sensors and digital logic which can be utilized for orientation in space, environmental data, and much more. It is completely hackable module, which is also a separate development platform itself.

Fig. 5. KenjiX1 Tower Modules, TM-1(right) and TM-2 (left).
TM-1 or TM-2 can be equipped upon desire Fig. 5. TM-2 has high-performance optical sensors, LIDARs: TOF and LASER, photosensitive measurement sensors and so on. Upon demand TM-2 can be ordered with LCD, as well as OLED displays, but the TM-1 comes only with LCD type.
Communication with the robot can be initiated over 2.4GHz and 5GHz IEEE 802.11.b/g/n/ac wireless LAN, Remote-Control and cable. The omnidirectional antenna located on Tower module, covers a range up to half kilometer, although the signal strength can vary, if buildings or similar blocking installations appear in between.
There are two USB ports available on module, and located next to each other. These can be used for communication and, or control over the PC. Left-side USB port is connection to roboDrive Engine interface, and the right-side USB port is communication with the WLAN-“SOM” aka ESP-32 WRover-B system on module.
Number of ways exists for interacting with the robot and programming it. Despite the two USB ports, KenjiX1 has a dedicated ISP programming port Fig. 6, which is used only for programming, updating the firmware inside the roboDrive PCB stack.

Fig. 6. ISP console reporting about device status (a), roboDrive console reporting system stats, when in operating duty (b).
Once in a while roboDrive console reports robot’s and system’s stats over USB-UART bridge. As seen in Fig. 6 (b), it lets you know the actual power-supply voltage level, then reports the status of the onboard LIDAR, distance measured, including ambient lightning conditions, date and time and so on. Further parameters can be added or removed, or saved to a file for further evaluation inside the compute module.
The entire ecosystem and toolchain, works for both, Linux and Windows operating systems. That being said, no matter which background user comes from and toolchain flavor, there is cross-platform functionality available.
Working in laboratory test-chambers is one of the applications where KenjiX1 excels. It helps researchers to work remotely through robot and initiate experiments over PC. Robot has been equipped with two multi-segment and multifunctional manipulators, with grippers at the end, to grab or manipulate, load or unload objects, turn knobs. Each arm consists of seven servo-motors with gradual load bearing capabilities. The metal servo brackets combined with servo-motors form joints, which exert strong forces along the rotation axes, and can easily pinch, break, or crash fingers or arms if safety measure are not strictly followed.
Therefore it is highly-advised to operate robot at safety distance and making yourself familiar with its operating manuals and programming guidelines on our website or in GitHub page
https://github.com/Physalis-Labs.
Fig. 7. KenjiX1 manipulators, (Left/Right), multiple degrees of freedom, several kilograms of load craning per arm.
Not only, it is possible to program arms for repetitive and precise movements, but also working with each arm remotely in real-time, while controlling the robot. Manipulators are very flexible devices, and are capable of fine-tuned movements. Additionally user can add sensors, lightning or cameras to the racks on both arms Fig. 7.
Manipulators are easily detachable from the robot. In case when both manipulators are not required, they can be completely removed or replaced with payload. That way, robot’s payload capacity will increase. Manipulators are normally (default state, after booting) in parked position, which is the most energy saving. They can be activated momentarily by the operator/user.

Fig. 8. Manipulator rotation angles for both sides :( Left/Right), the angle () can vary in range from -10° up to 90°. Step resolution, movement speed and many other parameters are user programmable through roboDrive Engine in main module.
Manipulators can move unconstraint over several axes as illustrated in Fig. 8 (a) and (b). Rotations are achieved by one or several servo-motors synchronized behavior. In Fig. 8 (a), the manipulator can be moved in range of (-10°) till (90°) on X-Axis.
The movements are applicable both in static state, and dynamic, while driving. The vertical Y-Axis movements are can synthesize higher degree of flexibility. That way, one can achieve numerous positions in space.
Grippers can grab virtually any possible geometry or shape with the soft silicon based cover on their ends. The only constraints they have are related to the size of the object, and the weight. The maximum opening of the gripper lays under (44 mm). It can rotate 360°, so it’s assists the grab-positioning against the object in best possible way.
High flexibility of “Mecha-Arms v1” is programmed over the roboDrive Engine, and commands are sent to robot inside a console. It is possible to control complete arm, or a single part of the arm, that is a servo-motor. The operator has access to arm via console in real-time. Running complex movements including multiple servo-motor behaviors, also connecting to single servo-motor on each arm is possible.
On the other hand, the arm movement can be programmed in advance, to be called later upon request via “roboDrive” console. Still the single servo-motor communication channel will be preserved and kept operational.
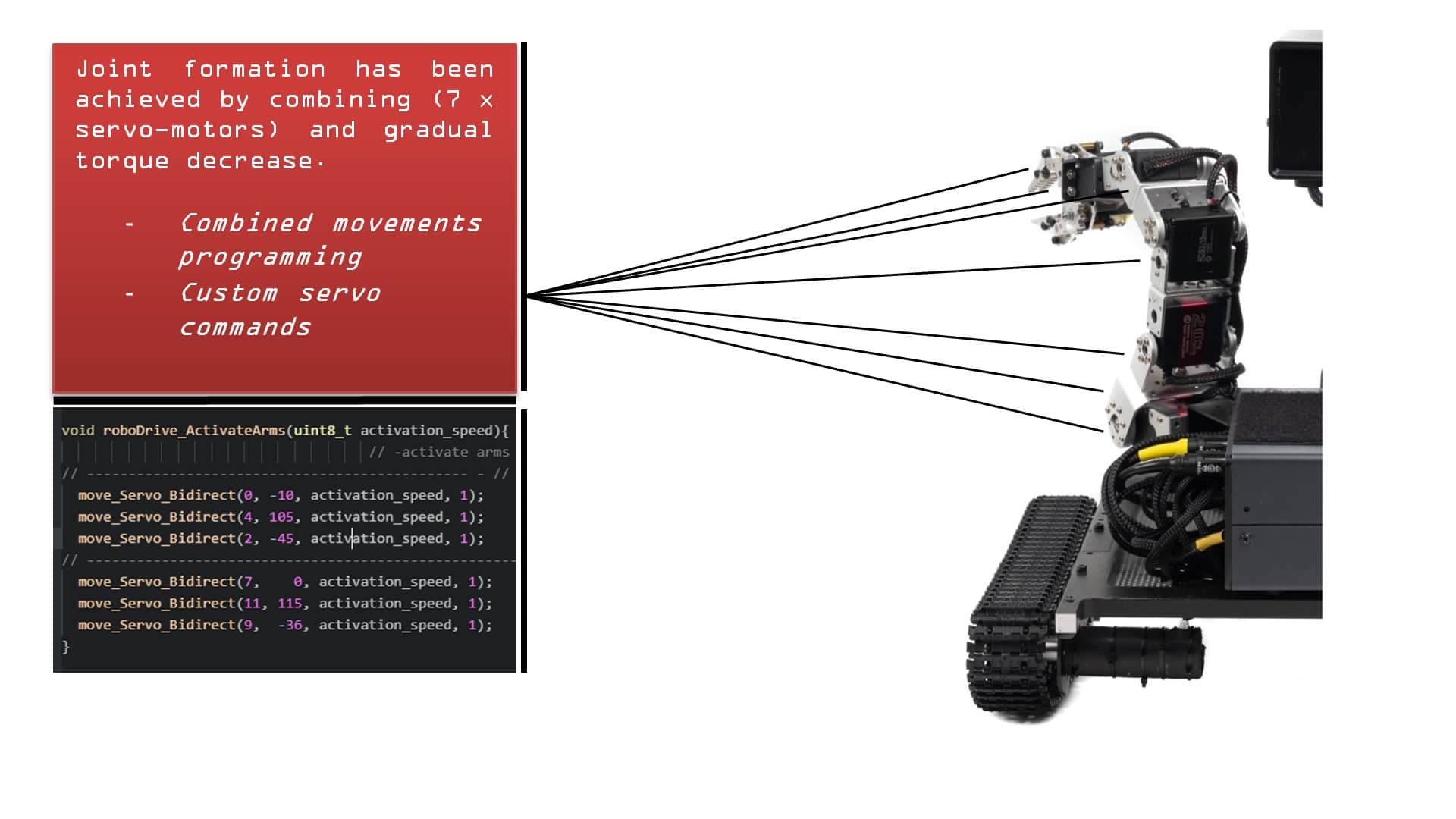
Fig. 9. Code snippet from roboDrive Engine Firmware v.5.7_B.
In Fig. 9 several calls to move_Servo_Bidirect() subroutines are encapsulated together to form a complex behavioral function. That is: roboDrive_ActivateArms() function, which upon call, performs the action which in this case happens to be the activation of the manipulators.
Power-Supply module is the main source of the power to the robot. All the onboard electronics, including the drivetrain, manipulators, and roboDrive and tower modules get the power from it. The power-supply module can be attached or detached from the robot through a power-velcro. Physalis Labs has created a tool-less and screw-less and super-easy technique to maintain the KenjiX1’s module integration.
That way, there is no hassle with tools, and screws, and bolts or nuts and lose them around when attaching or detaching modules to KenjiX1 , when outside in field operations and when your hands are freezing and you just can’t get that M(3x6) dialed into the hole. The power-Velcro strapping is a convenient way to attach or detach modules in seconds completely tool free.
Power-supply module consists of lithium-polymer rechargeable batteries manufactured by Panasonic. At full charge the voltage levels at 12.7 – 13 volts with capacity of 5500 mAh. The mentioned capacity is enough to keep the robot up and running for more than 6 hours. Although it depends on how heavy it’s being driven, used manipulators to handle objects.
The more payloads it carries or engages manipulators or driving in rough terrain the more power needs to be drawn from power source, thus shortening the total uptime.
Indoor usage of KenjiX1 with minimal driving can yield up to 6 hours. Physalis Labs offers a double capacity power-supply module, which will keep KenjiX1 online and running for almost double the time.
That’s enough time to recon a big warehouse for any unexpected fire alarms; verify the air quality inside the chemical factory, or to conduct chemical/physical experiment inside a chamber remotely. Complete a home run to see if everything is fine, since you left for months to travel and so on.


Fig. 10. Rechargeable battery module attached on top of the roboDrive module.
Rechargeable battery-pack aka Power-Supply module is very powerful and capable of suppling peak currents up to (I = 20A) currents upon demand. This feature enables KenjiX1 to react to changes in kinetic parameters also to changes in real world actively and in a more bursty style. Due to this, all heavy-duty hardware subsystems even at stalling are getting their peak current draw needs satisfied.
KenjiX1 ships to customers with a dedicated charger and one Power-Supply module included. The charging process is a neat and short experience. User/operator has can charge module directly on robot, without detaching it. Secondly there is a possibility to detach the Power-Supply module, and charge it separately.
The second option suits more when there are several Power-supply modules around and are planned to be used later in the field. That way, user/operator can charge several modules and keep them ready in backpack for replacement in the field. Charging process is smooth and fast. In fully discharged state, it charges the module to 100% in less than 2 hours.

Fig. 11. Rechargeable battery module (left), charger with US socket and EU adapter (right).
This is very nice especially if you are working a lot with the robot and try to keep the downtime as short as possible. There are several customization options available for the module which can be configured when submitting an order: waterproofness IP-rating, capacity, voltage to name a few.
Piloting the KenjiX1 is done remotely via Tier-2 layer, which also serves as a telemetry and data exchange channel between robot and the host-PC, where the user/operator resides Fig. 12. For the beginning user starts a SSH session with the KenjiX1 according to the IP-address it has received from the Local Area Network Provider.
When the IP address dedicated to the platform is found, the connection can be initiated over “Tier-2” subsystem, which is a Linux SBC (Raspberry-Pi).

Fig. 12. Simplified communication and signal path with the Host.
There is a dedicated remote-control to the platform. It can communicate for distances up to 700 meters. The terrain although may affect the signal strength and bandwidth. But in wide open areas, with less concrete buildings it does a good job and the piloting is smooth and doesn’t lag. There is an option to apply both, but some hardware adjustments should be done in advance.
Currently the application for using control over the smartphone app or similar is under discussion. In future there might be something coming out. At the moment these two methods are the way to go.
Several weeks has been dedicated in field testing operations involving developers from Physalis Labs and the KenjiX1 prototype for both, indoor and outdoor applications. Some of the terrain stepped through and piloted had a massive natural green coverage in form of grass, road metal, asphalted and unpaved roads to name a few.
Normally the platform was deployed in default configuration and communication was achieved via laptop. All these tests have revealed many interesting results.
KenjiX1 was driving in grass of about 25 cm and had no issues navigating the terrain. The manipulator control was working also smooth, although as beginner you need to spend some time training yourself and getting the feeling of being a remote pilot of a Mech.
Sometimes, as a beginner you have to try more than once to grab a pipe, or spare parts with the manipulators, but they are very responsive and pack a punch of power. KenjiX1 was deployed as a monitoring and patrolling robot for an energy harvesting facility, based on a renewable energy (Wind Generators Park) and the electricity production power-plant.
Running at night was also not an issue due to its high-power night light and adjustable speed of the drivetrain. It was expected to face communication issues, due to operating in electrically noisy area, around high-voltage systems, but the communication was solid and no issues have been encountered. Before shutting down it has operated at least 5 hours, with heavy usage of both manipulators and lots of driving and navigating through terrain.
The carrier frame of the robot chassis landed itself very good at keeping all the modules together and at the same time balancing the robot. Even at times when the stability in the terrain was compromised it wouldn’t just flip-over.

Fig. 13. Ocean crab in the wild.
KenjiX1 design has a deeply embedded wisdom to it, stemming from nature. Inspired by “decapod crustaceans” lifeforms, aka ocean crab, which naturally evolved to be agile in numerous challenging terrains (sea, seashores, sandy beaches, rocks, caves) further on this topic here https://en.wikipedia.org/wiki/Crab.
Ocean crabs are very unique which comes to their natural body shape allowing them to stay stable and employ their pincers even when the waves emerge, its lower positioned core and legs located sideways help them run extremely fast on sand and in rocks. Front positioned pincers and eyes work perfectly together to look for food or dig burrows. As human I doubt that I can catch a crab on a sandy beach.
KenjiX1 has gotten some of these biologic boosters, and in side by side comparison one can see that the tracks are positioned widely away and are attached to CNC machined (EN AW-2024) aluminum alloy frame, which is also widely used in aircraft and space industry, for its strength to weight ratio.
It correlates to the ocean crabs wide body with flat bottom. Furthermore the pincers and eyes together are on the front side. Likewise KenjiX1 adopted front-side positioned manipulators, optical sensors, light; vision which is moving is the same angle as the ocean crabs arms and pincers.

Fig. 14. Analogy in anatomy of both: Ocean crab vs. KenjiX1.
KenjiX1 tele-robotics platform can be a good option for wide variety of people who are interested in tele-robotics platforms but not have the time to apply for a research grant or to hire development team to be able to access the technology. It has all the bangs and whissles one would expect and comes with the astonishingly affordable price-point and is completely open-source.
It’s an overlapping point between industrial-robotics farcry, which is miles away and extremely high-priced and between the maker/tinkerer levels products which claim to be oriented for jumpstarting into robotics but in reality are limited for what they can offer and are not expandable.
“If you’ve had some experience programming smallish robots and you would like to expand upon and jumpstart into real tele-robotics development, then this platform is for you!”
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut sagittis viverra felis sed mollis. Nulla facilisi. Vivamus condimentum arcu ultrices, lacinia lectus vitae, varius magna. Aenean fermentum rhoncus luctus. Mauris sed ultricies enim. Maecenas iaculis turpis at dui egestas scelerisque. Donec ac massa feugiat, posuere nibh gravida, ornare erat. Nunc accumsan arcu quis nulla posuere, viverra condimentum augue sagittis. Donec faucibus tortor in tempus auctor. Nunc et volutpat urna. Nullam porttitor odio risus.
Lorem ipsumMauris porttitor elit vitae velit pretium rhoncus. Sed efficitur egestas quam, id tincidunt nibh imperdiet sit amet. Donec a nibh non turpis vestibulum venenatis. Donec imperdiet auctor vehicula. Fusce efficitur felis mi, at cursus purus tempor rutrum. Curabitur at nulla odio. Vivamus ac dui ante. In elementum euismod ligula at porta.
<form action="/submit-form" method="post">
<label for="username">Username:</label>
<input type="text" id="username" name="username"><br>
<label for="password">Password:</label>
<input type="password" id="password" name="password"><br>
<label for="email">Email:</label>
<input type="email" id="email" name="email"><br>
<label for="message">Message:</label>
<textarea id="message" name="message"></textarea><br>
<input type="submit" value="Submit">
</form>
Praesent tincidunt velit et libero suscipit, non aliquam tortor commodo. Aliquam iaculis ligula eu auctor vulputate. In interdum nulla vel tempus euismod. Aliquam at dapibus purus. Pellentesque mattis et leo non pulvinar. Curabitur ac interdum turpis. Sed imperdiet massa quis libero interdum blandit. Donec metus nibh, semper vel posuere nec, pharetra id eros. Nullam semper posuere ex, a sollicitudin odio gravida vel. Vestibulum posuere felis mi, sed aliquet est commodo vitae. Proin a dui quam.
Praesent tincidunt velit et libero suscipit, non aliquam tortor commodo. Aliquam iaculis ligula eu auctor vulputate. In interdum nulla vel tempus euismod. Aliquam at dapibus purus. Pellentesque mattis et leo non pulvinar. Curabitur ac interdum turpis. Sed imperdiet massa quis libero interdum blandit. Donec metus nibh, semper vel posuere nec, pharetra id eros. Nullam semper posuere ex, a sollicitudin odio gravida vel. Vestibulum posuere felis mi, sed aliquet est commodo vitae. Proin a dui quam.
Example 1 linkPraesent tincidunt velit et libero suscipit, non aliquam tortor commodo. Aliquam iaculis ligula eu auctor vulputate. In interdum nulla vel tempus euismod. Aliquam at dapibus purus. Pellentesque mattis et leo non pulvinar. Curabitur ac interdum turpis. Sed imperdiet massa quis libero interdum blandit. Donec metus nibh, semper vel posuere nec, pharetra id eros. Nullam semper posuere ex, a sollicitudin odio gravida vel. Vestibulum posuere felis mi, sed aliquet est commodo vitae. Proin a dui quam.